










Serviços Personalizados
Journal

artigo
 Português (pdf)
Português (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
Indicadores
Compartilhar

 Permalink
PermalinkAletheia
versão impressa ISSN 1413-0394
Aletheia n.25 Canoas jun. 2007
ARTIGOS DE ATUALIZAÇÃO
Uma proposta para o tratamento de fobias de direção através da criação de rotas automotivas virtuais
A proposal for driving phobia treatment by creating automotive virtual routes
José Gustavo de Souza Paiva1; Alexandre Cardoso2; Edgard Lamounier Jr.3
Universidade Federal de Uberlândia (UFU)
RESUMO
Este artigo apresenta um projeto de pesquisa com o objetivo de desenvolver uma interface para criação de rotas virtuais a serem utilizadas em um sistema de Realidade Virtual aplicado ao tratamento de fobia de direção. O diferencial desta interface em relação àquelas existentes atualmente reside no fato de que ela propicia maior flexibilidade na criação das rotas, permitindo uma personalização destes trajetos, de acordo com o perfil de cada paciente.
Palavras-chave: Fobia de direção, Realidade virtual, Criação de rotas.
ABSTRACT
This paper presents a research project with the objective to develop an interface to virtual route creation, based on Virtual Reality techniques for driving phobia treatment. The main contribution of this system is its flexibility for route creation, allowing a customization of these routes, according to each patient’s profile.
Keywords: Driving phobia, Virtual reality, Route creation.
Introdução
Segundo Kiss e colaboradores (2003), a utilização da Realidade Virtual (RV) como uma ferramenta na área da Psicologia Clínica tem crescido consideravelmente nas últimas décadas, sendo utilizada em uma variedade de tratamentos psicológicos, como por exemplo, no combate a depressão, doenças relacionadas com idade, controle de raiva, e no tratamento de fobias (Netto, Machado & Oliveira, 2002).
Wauke, Costa e Carvalho (2002) apresentam as principais vantagens da utilização da Realidade Virtual para o tratamento de fobias, em relação aos tratamentos tradicionais:
• O sistema apresenta ambientes virtuais realísticos, capazes de simular a inserção do paciente em situações similares àquelas corriqueiras de trânsito;
• Como a terapia é realizada totalmente dentro do consultório do psicólogo, esta se torna mais segura, e menos constrangedora para o paciente;
• Permite que o psicólogo controle gradualmente o nível de exposição do paciente à situação que lhe causa fobia;
• Por utilizar apenas um computador e um equipamento de RV, o tratamento tem um custo reduzido, se comparado a terapias de exposição real;
De acordo com Boralli et al. (2003), podemos encontrar diversos projetos de pesquisa que utilizam RV para o tratamento de fobias tais como:
• Fobia de aranhas (Carlin, Hoffman & Weghorst, 1997);
• Fobia de voar (Hodges et al.2001);
• Agorafobia, ou medo de lugares abertos (Romano et al., 2002);
• Transtorno de Estresse Pós-traumático (Hodges et al., 2001);
Cabe um destaque à fobia de dirigir. Algumas vezes, este tipo de fobia é conseqüência de um Estresse Pós-traumático (Galovski, 2005). Nos últimos quinze anos, pesquisadores começaram a descobrir que certa porcentagem de sobreviventes de acidentes de carro desenvolveu um estresse pós-traumático. Segundo o autor já citado, 39% de 158 sobreviventes de acidentes automotivos graves apresentavam sintomas de estresse pós-traumático e, dentre 92 sobreviventes de acidentes de carro hospitalizados na Austrália, 25% deles apresentavam sintomas de estresse pós-traumático.
A fobia de direção apresenta-se como um grande transtorno pessoal. Considerando um indivíduo que tem medo de cobras, por exemplo, tal fobia não lhe causa maiores problemas, a não ser que ela vá a um zoológico (que possua cobras), uma vez que é difícil encontrá-las comumente, e evitá-las é relativamente simples (Lanyi & colaboradores, 2004). Por outro lado, a habilidade de dirigir um veículo representa um componente fundamental para uma vida independente. Desta forma, o medo de dirigir pode causar grande impacto na vida pessoal do paciente, afetando seu trabalho, lazer, e inclusive atividades domésticas (Schultheis & Mourant, 2001).
Diversos sistemas em RV para o tratamento de fobia de direção são encontrados. Dentre as limitações destes sistemas, destaca-se a impossibilidade de propiciarem flexibilidade na criação de rotas (a serem experimentadas pelo paciente durante o tratamento). Geralmente, os sistemas apresentam rotas já construídas, com elementos como ruas, pedestres, túneis, casas, etc., mas não permitem que as posições destes elementos dentro do ambiente virtual de experimentação sejam modificadas, ou que novos elementos sejam inseridos.
Em alguns sistemas o psicólogo pode ainda alterar as condições de tráfego, escolhendo rotas com tráfegos variados de pedestres e automóveis, ou alterar as condições climáticas da rota. Desta maneira, nem todos os elementos que causam fobias podem ser combatidos, porque estes sistemas não oferecem rotas com todos estes elementos. Além disso, as mesmas rotas têm que ser utilizadas para todos os pacientes, o que não é eficiente, visto que cada paciente desenvolve o medo de direção por um motivo particular.
Os sistemas de construção de ambientes virtuais que podem ser adaptados para serem utilizados com a construção particularizada de rotas customizadas não foram desenvolvidos para este fim, e possuem uma interface que tende a ser muito complexa e não intuitiva para um psicólogo, tornando o seu trabalho pouco eficiente.
Outra desvantagem dos sistemas atuais, tais como o proposto por Ku (2002), no qual foi utilizado um carro real e projetores que exibiam o ambiente destinado para o tratamento de fobia de direção refere-se ao alto custo de aquisição. Em tais sistemas, os periféricos envolvidos são igualmente caros, o que resulta em um tratamento muito oneroso para o paciente.
Sistemas relacionados
A seguir, são apresentados alguns sistemas que utilizam a Realidade Virtual no tratamento de fobia de direção e simulação de trânsito automotivo.
O DriVR é um sistema computacional para tratamento de fobias que utiliza um software gerador de cenários 3D conectado a controles de direção e um óculos de Realidade Virtual.
O DriVR oferece funcionalidades como medição da performance do paciente, na medida em que ele navega pelo cenário, um visualizador de rotas percorridas, permitindo ao psicólogo e ao paciente rever a rota percorrida durante o tratamento, através de uma vista aérea, um construtor de rotas, que possibilita a determinação da complexidade das rotas, bem como a escolha dos cenários que irão fazer parte dela, e um seletor de condições do ambiente, que permite a configuração das condições do ambiente, tempo, estrada e iluminação da rota.
A principal desvantagem apresentada pelo DriVR é a pouca flexibilidade apresentada pelo seu construtor de rotas. Ele não permite a criação de novas rotas, e o psicólogo pode, além de combinar as rotas existentes (aumentando o percurso para o paciente), apenas configurar as condições do ambiente, tais como condições de tempo, da estrada e da iluminação do percurso.
O Cave Lab Driving Rehabilitation Project (Ku, 2002) utiliza um sistema no qual um carro real é conectado a um programa computacional, que gera uma ambiente virtual no qual uma rota é percorrida pelo paciente. O sistema possui, além do software, um projetor que exibe o ambiente a ser percorrido pelo paciente, além de caixas de som utilizadas para reproduzir os sons deste ambiente, e um Sub-Woofer colocado debaixo do banco do motorista, para conferir vibração durante o tratamento.
O ambiente virtual gerado pelo sistema apresenta características como o acesso a ruas e avenidas com grande tráfego de veículos, e ruas com pouco ou nenhum tráfego, além da circulação inesperada de pedestres na rua e a presença de outros veículos controlados, como carros, ônibus, etc.
Este sistema, por utilizar um carro de verdade para o tratamento, possui um custo de aquisição elevado. Além disso, ele não permite a utilização de outros carros reais, sem que estes sejam modificados, prejudicando sua portabilidade. Entretanto, seu maior problema reside na ausência de um construtor de rotas, o que impede que o psicólogo realize o tratamento utilizando rotas diferentes das apresentadas pelo sistema.
O STISIM Drive é um sistema de simulação de trânsito construído para representar atividades cognitivas e tarefas comuns do trânsito. O sistema apresenta um modelo de dinâmica do veículo &– permitindo a configuração de características para o controle de direção e velocidade, definindo o sistema de marchas do veículo e o número de marchas do mesmo. Além disso, permite a visualização da rota, tanto através da utilização de monitores ou projetores de vídeo, quanto através da utilização de Head Mounted Displays (HMD) para a visualização do cenário em 3D.
Este sistema também possui uma linguagem de definição de cenários, para que o usuário crie rotas descritas na forma de arquivos de eventos, enumerando todas as tarefas a serem realizadas, e os eventos possíveis de acontecerem dentro do cenário.
Por fim, destaca-se no STISIM Drive a possibilidade de medição de performance, permitindo a avaliação, por exemplo, do tempo de colisão com outros veículos ou pedestres, do número de vezes em que o limite de velocidade foi excedido, do tempo total do percurso, número de acidentes, entre outras medidas.
Dentre as desvantagens deste sistema, podemos citar o seu elevado custo de aquisição, proporcionado pela utilização de uma cabine simuladora de direção sofisticada, aliada a um projetor de grandes proporções. Além disso, a Linguagem de Definição de Cenários, fundamentada em ‘scripts’, apesar de ser poderosa e flexível, permitindo a criação de diversos tipos de rotas, é pouco intuitiva para usuários que não tem conhecimento de programação computacional (que é o caso da maioria dos psicólogos), o que pode tornar esta tarefa indesejavelmente trabalhosa.
Arquitetura do sistema
Considerando as limitações encontradas nos sistemas apresentados, propõe-se, através de uma equipe multidisciplinar composta por psicólogos, analistas de sistemas e projetistas de software, desenvolver um sistema para tratamento de fobia de direção caracterizado por:
• Presença de ambientes virtuais que simulem trajetos reais percorridos por um motorista em um carro;
• Baixo custo, para que o tratamento seja interessante financeiramente para o paciente;
• Flexibilidade na criação de rotas de experimentação compatíveis com as necessidades individuais de cada paciente, permitindo ao psicólogo atender aos pacientes adequados;
• Uma interface de construção de rotas que propicie um nível de abstração próximo à linguagem natural humana, que permita ao psicólogo (que muitas vezes não tem um entendimento avançado em sistemas computacionais), desenhar de maneira simples e intuitiva suas rotas, sem se preocupar com o aprendizado de técnicas de Computação Gráfica, Realidade Virtual e programação.
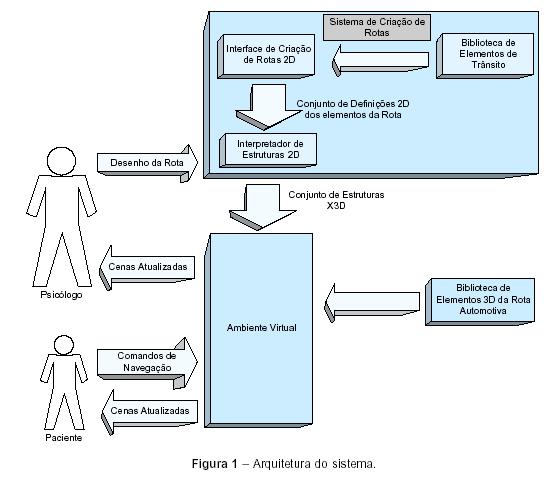
Baseado nestas características, a arquitetura do sistema foi projetada de acordo com a Figura 1. Neste sistema, o usuário irá interagir com a Interface do Sistema para construir a rota adequada. Na interface ele poderá manipular elementos como ruas, pontes, túneis, construções, entre outros, e posicioná-los da maneira desejada. Após finalizar a construção do ambiente 2D na interface, o sistema gerará um arquivo com todas as definições do ambiente virtual concebido. Este arquivo estará em um formato que será interpretado por um outro módulo do sistema, o Interpretador. Este conjunto de definições será então passado para o Interpretador, que buscará, em uma biblioteca de elementos de trânsito (com elementos em três dimensões), os objetos 3D correspondentes às definições passadas. Com esses objetos, será possível construir o arquivo utilizado para gerar o Ambiente virtual 3D para o tratamento. Este arquivo utiliza definições X3D, organizadas em um formato XML.
Funcionamento do sistema
O sistema proposto procura seguir dois princípios básicos: proporcionar alta flexibilidade ao psicólogo, para que ele tenha liberdade na criação de rotas customizadas de acordo com o perfil de cada paciente, e possuir uma interface simplificada e intuitiva, para que este psicólogo não tenha nenhuma dificuldade na construção destas rotas. Além disso, o sistema é capaz de fazer o mapeamento completo de uma rota construída em 2D &– um desenho feito pelo psicólogo, após estudo sobre o que seu paciente realmente teme ao dirigir &– para um ambiente virtual totalmente em 3D, de forma automática e transparente a este psicólogo, de forma que não seja necessário para ele ter qualquer conhecimento de técnicas em Computação Gráfica, Realidade Virtual ou programação computacional.
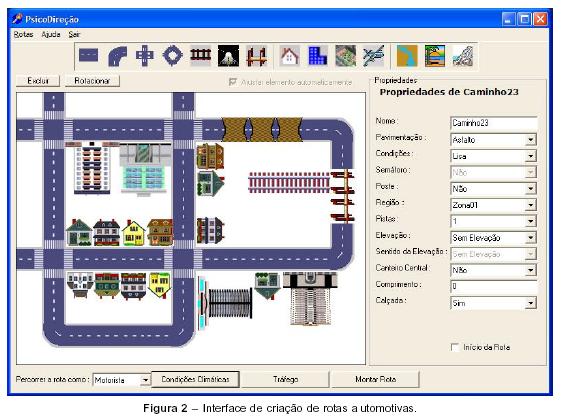
A Figura 2 mostra a tela principal da Interface de Criação de Rotas. Nesta tela, o psicólogo pode acessar uma variedade de elementos de trânsito, na forma de botões gráficos, que podem ser escolhidos e inseridos em uma área de desenho, localizada na parte central da tela. Após inserir um elemento de trânsito nesta área de desenho, o psicólogo pode manipular todas as suas propriedades. Cada elemento possui propriedades específicas. Assim, uma rua pode possuir mão dupla ou mão única, ser totalmente lisa ou esburacada, possuir um canteiro em sua área central, dentre outras características.
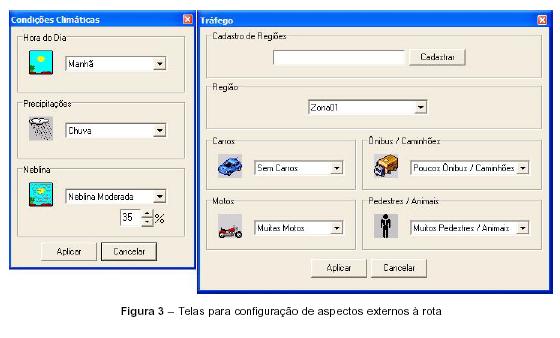
Para configurar os aspectos externos à rota, tais como tráfego, condições climáticas, quantidade de carros e pedestres nas ruas, o psicólogo pode utilizar telas de configuração, mostradas na Figura 3. Nela, é possível informar se o tráfego de veículos será alto, se a rota será percorrida ao anoitecer, ou durante o dia, se o percurso da rota será feito durante uma chuva, entre outros aspectos.
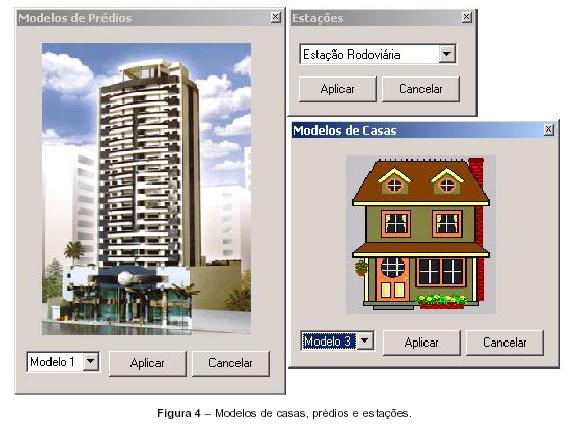
Para alguns elementos das rotas, como os prédios, casas e estações, é possível a escolha de alguns modelos já definidos, o que permite que haja uma variedade destes elementos dentro da rota. Esta escolha é feita nas telas de seleção de modelos, mostradas na Figura 4.
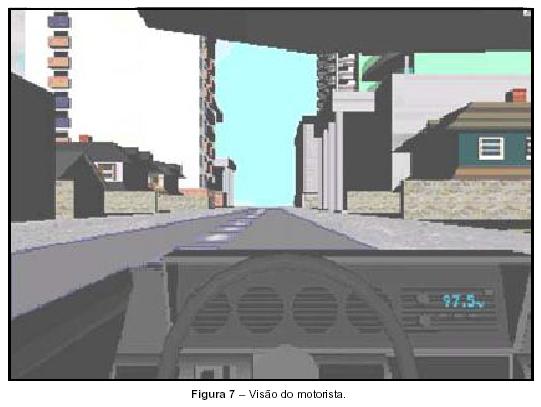
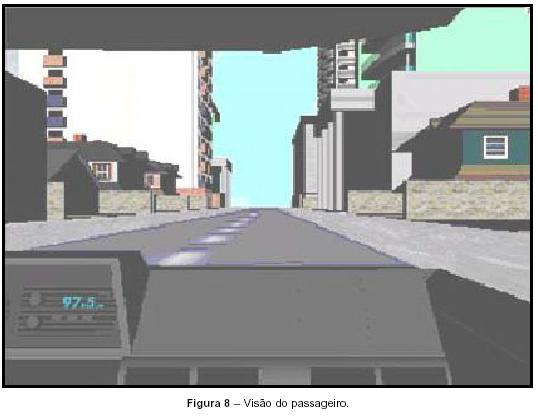
Terminada a construção da rota desejada, em 2D, o sistema já tem condições de gerar o arquivo no formato X3D, a ser utilizado pelo interpretador, na geração do ambiente virtual em 3D. As Figura 5, 6, 7 e 8 mostram como o Ambiente Virtual é mostrado ao paciente durante o tratamento.


Detalhes da implementação
A ferramenta Borland Delphi foi utilizada para desenvolver a Interface de Criação de Rotas. Esta ferramenta tornou possível a construção da área de desenho, e da seção de configuração das propriedades dos elementos de trânsito. Além disso, tornou possível a construção de um código cuja execução demonstrou bom desempenho, mesmo para rotas automotivas com um alto número de elementos de trânsito, revelando ser uma boa escolha para a construção desta interface. Um componente desta ferramenta, chamado ICOM XMLX Parser foi utilizado para gerar o arquivo de definições dos objetos em três dimensões, para exibir a rota virtual para o paciente.
A ferramenta VizX3D foi utilizada para modelar e construir todas as estruturas em três dimensões dos elementos de trânsito utilizados na rota automotiva. Esta ferramenta possui controles e funcionalidades específicas para construir códigos X3D, necessários para a exibição do Ambiente Virtual para o paciente, o que permitiu a construção de um código objetivo e eficiente.
Conclusão
A utilização da Realidade Virtual em áreas clínicas, em especial no tratamento de fobias, tem se mostrado bastante promissora, com um grande mercado em potencial. Não necessita de sistemas complexos e possui grande aceitação por parte dos usuários (Boralli et al., 2003).
O trabalho apresentado neste artigo propõe a resolução de duas das limitações principais dos sistemas de tratamento de fobia de direção existentes atualmente: a obtenção de maior flexibilidade na criação de rotas a serem percorridas pelos pacientes durante o tratamento, e de uma interface de criação destas rotas que seja simples e intuitiva ao psicólogo, de modo que não seja necessário para ele nenhum conhecimento em técnicas de Computação Gráfica, Realidade Virtual ou programação computacional.
Na medida em que o sistema é desenvolvido, e logo após o seu término, no momento de implantação e apreciação do usuário final, diversas idéias surgem com o objetivo de melhorar as características do sistema, ou adicionar novas funcionalidades a ele. A seguir são listados alguns ajustes e melhorias que poderão ser implementadas no futuro.
• Medidas de avaliação da performance do paciente à seria um grande avanço se o sistema fosse capaz de medir e apresentar dados de performance do paciente, como a exibição da velocidade média do carro durante o percurso, a quilometragem percorrida, se ele ultrapassou algum limite de velocidade, ou mesmo participou de algum acidente.
• Biofeedback à o sistema poderia, sob uma perspectiva mais distante, ser equipado com equipamentos de biofeedback, permitindo a medição e exibição da freqüência cardíaca, a respiração e o nível de ansiedade do paciente durante o tratamento, o que facilitaria a tomada de decisões por parte do psicólogo a respeito da evolução de seu paciente no tratamento.
• Melhorias na interface de construção de rotas à é importante melhorar a dinamicidade na representação gráfica dos elementos exibidos na Área de Desenho, através da implementação de uma funcionalidade que permita que eles tenham suas representações gráficas alteradas no momento em que o psicólogo altera o valor de suas propriedades. Além disso, pensa-se na inserção de novos elementos, propiciando à rota gerada um grau de realismo maior, em termos de funcionalidades.
• Criação de uma linguagem em script para construção de rotas à tendo em vista a utilização por pessoas que possuem um conhecimento maior de programação computacional, pensa-se em adicionar ao sistema uma linguagem de script para a construção de rotas, permitindo a estes usuários especificá-las através de arquivos textos. Estes arquivos poderiam se basear em seqüências de tarefas a serem realizadas dentro do cenário virtual, ou em uma descrição textual da organização dos objetos no ambiente.
• Melhorias no ambiente virtual 3D à Para tornar o ambiente virtual 3D mais próximo da realidade é interessante tornar os atores participantes deste cenário mais participativos. Desta maneira, seria possível conseguir resultados mais próximos daqueles observados em uma terapia de dessensibilização in vivo. Isso pode inclusive tornar o sistema eficiente para o tratamento de fobias de direção associadas à fobia social circunscrita, e ajudar pacientes que não desenvolveram a fobia de direção por terem sofrido algum trauma. Além disso, pretende-se aumentar o realismo no ambiente virtual através da melhoria na qualidade sonora do ambiente. Isto pode ser obtido pela utilização de uma quantidade maior de arquivos sonoros a serem reproduzidos durante o percurso.
Referências
Boralli, J. A., Katayama, G., Garcia, F. L., Simoes, E. D. V., & Netto, A. V. (2003). Sistema Integrado com Biofeedback e Ambientes Virtuais para Tratamento de Fobias, Symposium of Virtual Reality, Ribeirao Preto. [ Links ]
Borland Delphi Disponível em: http://www.borland.com/delphi/. Acesso em: Março/2005. [ Links ]
Carlin, A.S., Hoffman, H., & Weghorst, S. (1997). Virtual Reality and Tactile Augmentation in the Treatment of Spider Phobia: A Case Study. Behavior Research and Therapy, 35(2): 153-158. [ Links ]
DRIVR. Disponível em: http://www.drivr.com. Acesso em: Março/2005. [ Links ]
Galovski, T. E.(2005). Surviving the Crash: Stress Reactions of Motor Vehicle Accident Victims. Disponível em: http://www.giftfromwithin.org/html/crash.html. Acesso em Março/2005. [ Links ]
Hodges, L. F., Rothbaumb, B. O., Watsona, B. A., Kesslera, G. D., & Opdykeg, D.(2001). Virtual Reality Exposure for Fear of Flying Therapy, IEEE. Computer Graphics & Applications, 16 (6): 42-49. [ Links ]
Hodges, L., Anderson, P., Burdea, G., Hoffman, H., & Rothbaum, B. (2001). Treating Psychological and Physical Disorders with VR. IEEE Computer Graphics and Applications, invited article, 25-33. [ Links ]
Kiss, B., Szijártó, G., Benedek, B., Simon, L., Csukly G., & Takács, B. (2003). “CyberTherapy: Applications of Virtual Reality and Digital Humans in Clinical Psychology”, Második Magyar Számítógépes Grafika és Geometria Konferencia, Budapest.
Ku, J. H.,Jang, D. P.,Lee, B. S.,Lee, J. H.,Kim, Y. & Kim, S. I. (2002). Development and Validation of Virtual Driving Simulator for the Spinal Injury Patient. Cyberpsychology & Behavior5( 2), 151-156. [ Links ]
Lanyi, C. S., Simon, V., Simon, L. & Laky, V. (2004). Using virtual public transport for treating phobias. The Fifth International Conference on Disability. Virtual Reality and Associated Technologies, Oxford. [ Links ]
Netto, A. V., Machado, L. S., & Oliveira, M. C. F. (2002). “Realidade Virtual: Definições, Dispositivos e Aplicações.”, Tutorial. Revista Eletrônica de Iniciação Científica da SBC, II(2). ISSN 1519-8219.
OpenGL. Disponível em: http://www.opengl.org. Acesso em Março/2005. [ Links ]
Romano, D., Brogni, A., Steed, A., & Slater, M. (2002). Progress Report: Agoraphobia Research. 2nd EQUATOR Conference. Careys Manor, Brockenhurst, United Kingdom. [ Links ]
Schultheis, M.T. & Mourant, R.R. (2001). Virtual Reality and driving: The road to better assessment of cognitively impaired populations. Teleoperators and Virtual Environments 10 (4), 436-444. [ Links ]
STISIM Drive Disponível em: http://www.systemstech.com/index.php?pid=22. Acesso em: Março/2005. [ Links ]
VR Juggler Configuration Guide. Disponível em: http://www.vrjuggler.org. Acesso em Março/2005. [ Links ]
Wauke, A. P., Costa, R. M., & Carvalho, L. A. (2002). O Uso de Realidade Virtual no Tratamento de Fobias Urbana. Workshop de Realidade Virtual e Visualização Científica do LAMCE, Rio de Janeiro. [ Links ]
Web3D Consortium &– X3D Overview. Disponível em: http://www.web3d.org/x3d/overview.html. Acesso em Março/2005. [ Links ]
 Endereço para correspondência
Endereço para correspondência
E-mail: gustavo@ufu.br
Recebido em dezembro de 2006
Aceito em março de 2007
1 José Gustavo de Souza Paiva é Mestre em Engenharia Elétrica; professor da Universidade Federal de Uberlândia (UFU)
2 Alexandre Cardoso é Doutor em Engenharia Elétrica; professor da Universidade Federal de Uberlândia (UFU)
3 Edgard Lamounier Jr. é PhD, Doutor em Computer Studies; professor da Universidade Federal de Uberlândia (UFU)

