










Serviços Personalizados
Journal

artigo
 Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
Indicadores
Compartilhar

 Permalink
PermalinkJournal of Human Growth and Development
versão impressa ISSN 0104-1282versão On-line ISSN 2175-3598
J. Hum. Growth Dev. vol.29 no.2 São Paulo maio/ago. 2019
https://doi.org/10.7322/jhgd.v29.9419
ORIGINAL ARTICLE
Effect of object weight and experience on the organization of object management tasks in infants of 10 months of age
Laísla Camila da SilvaI; Inara MarquesII; Josiane Medina-PapstII
IState University of Londrina - Master's Degree in Physical Education. Center of Physical Education and Sports - State University of Londrina
IIState University of Londrina. Center of Physical Education and Sports - State University of Londrina
ABSTRACT
INTRODUCTION: CLittle is known about the real impact the practice of manipulating objects on the development of infants perception-action and it is assumed that this newly acquired knowledge is useful for planning future actions.
OBJECTIVE: To analyse the effects of controlled practice on the tasks of reaching and transporting objects in 10-month-old infants when the weight of the object was changed.
METHODS: Sixteen infants were divided into two groups: heavy/light group (HLG) and light/heavy group (LHG). The task consisted in reaching, grasping, and lifting a lighter or heavier bar 9 times. On the tenth trial, the object weight was switched to the heavier or lighter weight object (whichever was opposite to the object weight experienced in the first 9 trials) to assess whether infants had learned and adapted their object-directed movement strength to the initial weight condition practiced during the first 9 trials.
RESULTS: No significant differences were found when comparing the reaching and lifting phases within groups (LHG, P = 0.06 and HLG, p = 0.41). However, group comparisons revealed that HLG infants presented increased velocity peak (p = 0.01) during the trials
CONCLUSION: The reaching and object lifting trials of the infants throughout the attempts were very variable, indicating that, possibly, at 10 months of age, infants present transitions from one organizational state to another. However, it is necessary to carry out more detailed investigations on reaching and lifting actions of objects to understand the processes involved in these transition periods.
Keywords: infant behavior, motor skills, infant.
Authors summary
Why was this study done?
The variation of the restrictions can lead to fluctuations in manipulative actions, but there is still no consensus on how these fluctuations act in the configuration of these actions, so this study was carried out through the need to investigate the impact of restrictions on manipulative actions.
What did the researchers do and find?
The present study analyzed the effect of controlled practice on the tasks of reaching and transporting objects with different weights. It was verified that the actions of reaching and lifting the object, were variables throughout the practice, but that the variability in these actions is indispensable in the process of acquiring motor skills.
What do these findings mean?
The findings infer that infant at 10 months of age undergo a transitional period in which manipulative actions are reorganized.
INTRODUCTION
The process of motor development is revealed by the changes occurring in the three essential classes of movement, called stabilization, locomotion, and manipulation, which are the result of the interaction of multiple internal (organic) and external factors (confronting individual with individual, individual with group, and individual with physical environment)1.
In this sense, the individual is understood as a system composed of several subsystems, each one going through significant changes, such as neural, muscular, and skeletal systems for example, as well as the environment in which the individual is immersed in their social and emotional relationships. These changes occur at different rates, that will impact on the skill actions of the individual, and the emergence of these actions is due to the dynamic interaction between the subsystems that make up the individual2. Variations in the constraints of the individual, the environment and the task lead to fluctuations in behavior that might be followed by new forms of action. This can lead to changes in one of the subsystems, which will act as a rate-limiting factor (such as experience) on the emergence of new modes of action3,4.
Research within this theoretical framework has been able to identify and understand the effects of different constraints on the emergence of new behaviors in infants. Rounis et al.5, Wiesen et al.6, Libertus et al.7, Baumgartner & Oakes8, Bourgeois et al.9, Newell10, Rocha et al.11 and Mash12 were able to demonstrate the impact that the change in one or more subsystems could have on the motor developmental process in early childhood. Among the most commonly investigated factors that might impact on the subsystems are the effects of physical constraints, i.e., size, texture, shape, and weight of the object, and hand size, among others. Corbetta et al.13 have also drawn attention to the importance of practice. Practice in the manipulation of objects allow the infant and the young child to explore affordances in object manipulation. Very few studies have considered the role of experience and the effect of constraints on infant development, regarding the perception-action cycle. Similarly, the results of the study Corbetta & Snapp-Childs14 demonstrated that infants younger than nine months of age did not benefit greatly from an imposed controlled practice period, making the subject even more intriguing. According to this, before eight months of age, infants present some conflict between perception and action, which is possibly related to the lack of experience in manipulation of different forms of objects (textures, weight, and size), which consequently decreases exploration opportunities of affordances before 9 months of age.
While Molina & Jouen15 claim that object weight discrimination begins around the end of the first year of life, Mounoud & Bower16 state that younger infants are able to modify their actions based on the visual affordances of objects, as well as demonstrating the ability to differentiate objects17,18. In addition, when one addresses specifically the class of object manipulation in the first year of life, it should be noted that digit strength control acts as one of the main and most complex factors. Thus, in addition to previous experience, other factors may act in this process, such as the weight of the object and controlled practice, but there is still no consensus about the impact of these constraints on the adaptation and organization of infant manipulative behavior.
Therefore, it is imperative to understand the effects of controlled practice and the weight of objects on the reach and transport abilities of objects to interpret how these factors influence the configuration of these actions. Professionals could use this information to improve their interventions. In the present study, the objective was to analyse the effect of controlled practice on the tasks of reaching and transporting objects in 10-month-old infants when the weight of the object was changed. The initial hypothesis was that the infants would adapt to the weight of the object in the course of the practice, presenting more rectilinear trajectories with higher speeds and that their lifting would be modified in the post-test phase when the weight of the object was changed.
METHODS
Participants
In total, 146 infants were invited to participate in the study with the authorized participation given by parents or guardians. Subsequently, 9 infants did not attend, and 7 infants did not complete the task. In this way the study counted on the effective participation of sixteen healthy, full-term, 10-month-old (Xage=10.45 ±0.4) infants with no disabilities and/or any motor, cognitive, or sensory delays. The infants were randomly assigned to one of two groups: either heavy/light group (HLG; n = 08) or light/heavy group (LHG; n = 08). The HLG group reached for and manipulated the heavier bar first and the LHG group reached for and manipulated the lighter bar first.
Participants were recruited from a database of parents who gave their permission to be contacted at a later date to allow their child to participate in the study. Parents were contacted via telephone. During this initial phone contact, the parents were provided with an explanation of the study (goals and methods). If parents were interested in their infant participating in the study, they were scheduled for a laboratory visit. Parents who brought their infant, received a certificate of participation and a photo of their baby. This study was approved by the local university (CAAE: 55802115.0.0000.5231; seem: 2.484.868). Before beginning the study, all parents or guardians signed an informed consent form authorizing the participation of their infant.
Materials and Experimental Procedure
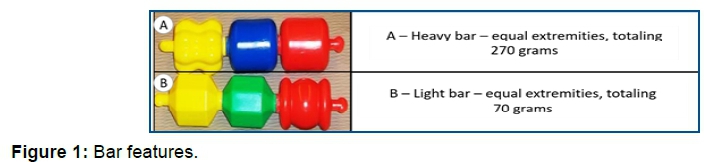
Two bars were made of high density polyethylene in primary colors (red, blue, green, and yellow), with 2 different weights (270 g and 70 g) and attractive to infants (Figure 1). Thus, bar weights could be "perceived" by the baby only from manipulating the object.
After being randomly assigned to one of the groups (HLG or LHG), the infants were fastened in a custom made infant seat with a wide, soft strap stabilizing their trunk while allowing free upper and lower limb movements. The height of the infant seat could be adjusted so that the infants' elbows comfortably rested on the table surface. During a
The process of motor development is revealed by the changes occurring in the three essential classes of movement, called stabilization, locomotion, and manipulation, which are the result of the interaction of multiple internal (organic) and external factors (confronting individual with individual, individual with group, and individual with physical environment)1.
In this sense, the individual is understood as a system composed of several subsystems, each one going through significant changes, such as neural, muscular, and skeletal systems for example, as well as the environment in which the individual is immersed in their social and emotional relationships. These changes occur at different rates, that will impact on the skill actions of the individual, and the emergence of these actions is due to the dynamic interaction between the subsystems that make up the individual2. Variations in the constraints of the individual, the environment and the task lead to fluctuations in behavior that might be followed by new forms of action. This can lead to changes in one of the subsystems, which will act as a rate-limiting factor (such as experience) on the emergence of new modes of action3,4.
Research within this theoretical framework has been able to identify and understand the effects of different constraints on the emergence of new behaviors in infants. Rounis et al.5, Wiesen et al.6, Libertus et al.7, Baumgartner & Oakes8, Bourgeois et al.9, Newell10, Rocha et al.11 and Mash12 were able to demonstrate the impact that the change in one or more subsystems could have on the motor developmental process in early childhood. Among the most commonly investigated factors that might impact on the subsystems are the effects of physical constraints, i.e., size, texture, shape, and weight of the object, and hand size, among others. Corbetta et al.13 have also drawn attention to the importance of practice. Practice in the manipulation of objects allow the infant and the young child to explore affordances in object manipulation. Very few studies have considered the role of experience and the effect of constraints on infant development, regarding the perception-action cycle. Similarly, the results of the study Corbetta & Snapp-Childs14 demonstrated that infants younger than nine months of age did not benefit greatly from an imposed controlled practice period, making the subject even more intriguing. According to this, before eight months of age, infants present some conflict between perception and action, which is possibly related to the lack of experience in manipulation of different forms of objects (textures, weight, and size), which consequently decreases exploration opportunities of affordances before 9 months of age.
While Molina & Jouen15 claim that object weight discrimination begins around the end of the first year of life, Mounoud & Bower16 state that younger infants are able to modify their actions based on the visual affordances of objects, as well as demonstrating the ability to differentiate objects17,18. In addition, when one addresses specifically the class of object manipulation in the first year of life, it should be noted that digit strength control acts as one of the main and most complex factors. Thus, in addition to previous experience, other factors may act in this process, such as the weight of the object and controlled practice, but there is still no consensus about the impact of these constraints on the adaptation and organization of infant manipulative behavior.
Therefore, it is imperative to understand the effects of controlled practice and the weight of objects on the reach and transport abilities of objects to interpret how these factors influence the configuration of these actions. Professionals could use this information to improve their interventions. In the present study, the objective was to analyse the effect of controlled practice on the tasks of reaching and transporting objects in 10-month-old infants when the weight of the object was changed. The initial hypothesis was that the infants would adapt to the weight of the object in the course of the practice, presenting more rectilinear trajectories with higher speeds and that their lifting would be modified in the post-test phase when the weight of the object was changed.
METHODS
Participants
In total, 146 infants were invited to participate in the study with the authorized participation given by parents or guardians. Subsequently, 9 infants did not attend, and 7 infants did not complete the task. In this way the study counted on the effective participation of sixteen healthy, full-term, 10-month-old (Xage=10.45 ±0.4) infants with no disabilities and/or any motor, cognitive, or sensory delays. The infants were randomly assigned to one of two groups: either heavy/light group (HLG; n = 08) or light/heavy group (LHG; n = 08). The HLG group reached for and manipulated the heavier bar first and the LHG group reached for and manipulated the lighter bar first.
Participants were recruited from a database of parents who gave their permission to be contacted at a later date to allow their child to participate in the study. Parents were contacted via telephone. During this initial phone contact, the parents were provided with an explanation of the study (goals and methods). If parents were interested in their infant participating in the study, they were scheduled for a laboratory visit. Parents who brought their infant, received a certificate of participation and a photo of their baby. This study was approved by the local university (CAAE: 55802115.0.0000.5231; seem: 2.484.868). Before beginning the study, all parents or guardians signed an informed consent form authorizing the participation of their infant.
Materials and Experimental Procedure
Two bars were made of high density polyethylene in primary colors (red, blue, green, and yellow), with 2 different weights (270 g and 70 g) and attractive to infants (Figure 1). Thus, bar weights could be "perceived" by the baby only from manipulating the object.
After being randomly assigned to one of the groups (HLG or LHG), the infants were fastened in a custom made infant seat with a wide, soft strap stabilizing their trunk while allowing free upper and lower limb movements. The height of the infant seat could be adjusted so that the infants' elbows comfortably rested on the table surface. During a period of familiarization, attractive toys were offered to the infant, however, the bars used in the experiment were not offered during the familiarization. After the period of familiarization, one experimenter sitting on the other side of the table offered either the light or heavy colored bar to the infant, placing it orthogonally (bar offered horizontally), in the center of the table, and at an easy reaching distance of 15cm from the infant. The infant was then encouraged to reach for the bar and lift it above the table surface after the experimenter demonstrated the action sequence. Infants were required to successfully lift the bar above the table surface to complete a trial. All infants were given nine consecutive practice trials of reaching, grasping, and lifting the same weight bar. After the ninth trial, the infants were given the bar of the other weight to reach for, grasp, and lift. Thus, infants in the HLG group received nine practice trials with the 270-gram bar, followed by a 10th test trial with the 70-gram bar. Infants in the LHG group received nine practice trials with the lighter bar, followed by one test trial with the heavier bar.
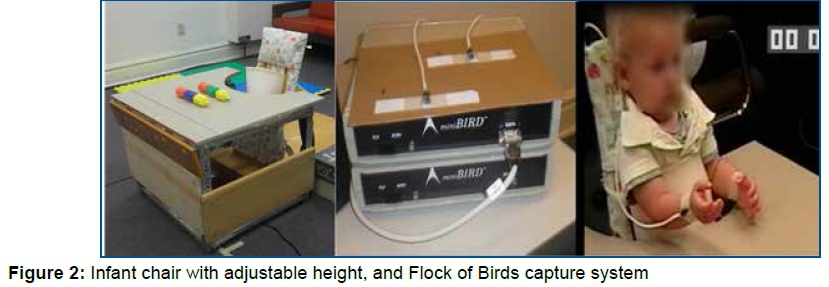
The actions of the infants with the bars were filmed by two digital cameras arranged in the sagittal plane on the table, and Digital Video Mixer equipment Videonics (Focus Enhancements, Inc., Campbell, CA) was used to synchronize the images from both cameras on the same screen. Kinematic analysis of arm movement was obtained by the Flock of Birds (Ascension Technology Corp.) motion analysis system, by positioning sensors on the back of each wrist using hypoallergenic tape. The Flock of Birds system tracks the movement of two 8mm markers within a pre-calibrated 30-inch radius magnetic field at a rate of 120 Hz. This motion analysis system is particularly advantageous to use with infants because it continuously tracks the mini markers regardless of the orientation or types of movements performed by the infants, without missing data (Figure 2).
Data Coding and Analyses
The output of the Flock of Birds system provided X, Y, and Z coordinate data from the fixed markers on both wrists, which were exported to MATLAB R2009b software for further analysis. The exported coordinates indicate several variables of spatial parameters (rectilinearity index), temporal parameters (such as displacement), and spatial-temporal parameters (velocity)12,19,20.
For the analysis of the actions of reaching and lifting, the first frame in which the baby's arm began, uninterruptedly, to move towards the object was defined as the beginning of the reach and the end of the reach was determined only when the arm movement resulted in a touch of the baby's hand on the toy. Lifting was defined as the first frame in which, after touching the object, there was displacement of the object from the surface until reaching the maximum height of uninterrupted object movement19,21,22. Two experimenters performed an analysis in which the information of "Start Reaching", "First Touch", "Start Lifting", and "Max lifting" were extracted, as well as the hand which the child used to perform each phase.
The implemented routine applies a conversion of the X, Y, and Z coordinates from inches to centimeters, performing spectral analysis of the signal, to establish a cut-off frequency appropriate to the three coordinates, thus adopting a fourth-order Butterworth filter with a cut-off frequency of 6 Hz. The same routine also calculated displacement (cm), linear trajectory (cm), the rectilinearity index (cm), mean velocity (cm/s), and peak velocity (cm/s) for the transport phase. The rectilinearity index variable was calculated from the division of two other variables: the displacement (cm), which is characterized as the trajectory from the beginning to the end of the transport, and linear trajectory (cm), characterized as the straight trajectory between the beginning and end of transportation. The rectilinearity index informs the difference between the linear trajectory and the total displacement.
For the inferential analysis, the normality of the data and the homogeneity of the variances were tested using the Shapiro-Wilk test, however, as the assumptions were not satisfied, we opted for non-parametric tests. We chose to express the data though mean of the practice trials (MPT), to compare with the mean of the post-test attempt (PTA). In addition, a comparison was performed of the mean of the post-test attempt (PTA) with the mean of the last practice attempt (MLPA)
Regarding the rectilinearity index variable, a comparison of the practice attempts was carried out using Friedman's test. Wilcoxon's test was used to compare the mean of the practice trials (MPT) with the mean of the post-test attempt (PTA) and the comparison of the mean of the last practice attempt (MLPA) with the post-test (PTA) mean. Mann-Whitney's U test was used to compare the groups in the post-test attempt (PTA). The Statistical Package for the Social Sciences - SPSS for Windows - (Version 20.0, SPSS Inc.©, Chicago, Illinois) was used, adopting a level of significance of P <0.05.
RESULTS
Reaching Phase
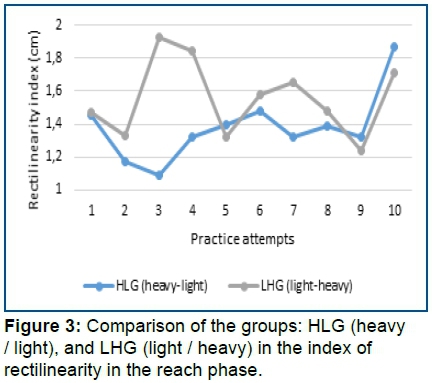
The analysis of the rectilinearity index in the reaching phase did not identify statistically significant differences in the comparisons of the practice attempts (x 2 = 4.48, gl = 8, p = 0.81). The same was observed when comparing the mean number of practice attempts (MPT) with the post-test (PTA) (Z = 1.11, p = 0.26) and the mean of the last practice attempt (MLPA) with the post-test attempt (PTA) (Z = 0.51, p = 0.60). The variance in the rectilinearity index in the reach phase in the groups was: HLG (σ2 = 0.04); LHG (σ2 = 0.05), (see figure 3). Likewise, when comparing the groups in the reaching phase, in the post-test (PTA) trials (Z = 0.31, p = 0.75), no statistically significant differences were found (Figure 3).
In relation to the mean velocity in the reaching phase, practice attempts were compared and no statistically significant differences were found in the intra-group comparison: LHG (x2 = 10.82, gl = 9, p = 0.28) and HLG = 5.91, gl = 9, p = 0.74). The same occurred in the comparison between the groups (x2 = 12.3; gl = 9; p = 0.19). The variance in the mean velocity in the reach phase in the groups was: HLG (σ2 = 143.0); LHG (σ2 = 39.12), (Figure 4).
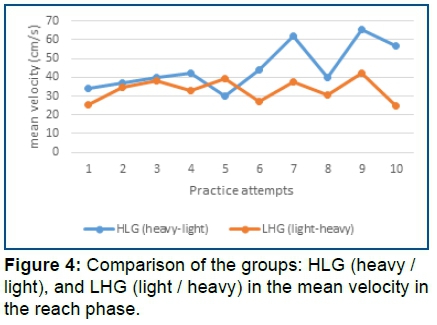
Comparing the mean velocity of the last practice trial (MLPA) with the post-test trial (PTA) (Z = 1.86, p = 0.63), and the comparison of the mean of the last practice trial (MLPA) with the post-test attempt (PTA) (Z = 1.29, p = 0.19), no statistically significant differences were found. The same occurred in the post-test comparison (PTA) between the groups (Z = 1.36, p = 0.17).
Regarding the peak velocity variable in the reach phase, intra-group attempts were compared: LHG (x2 = 7.43, gl = 8, p = 0.49) and HLG (x2 = 6.90, gl = 8; p = 0.54) and no statistically significant differences were found. The same occurred in the comparison between the groups (x2 = 11.1, gl = 8, p = 0.19). The peak velocity variance in the reach phase in the groups was HLG (σ2 = 260.30); LHG (σ2 = 69.75), (Figure 5).
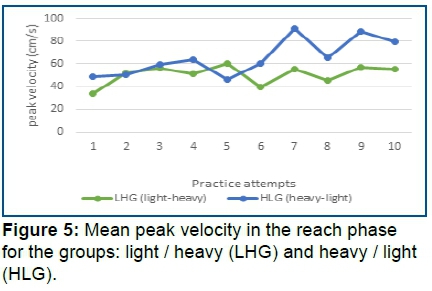
In the comparison of the peak velocity of the last practice attempt (MLPA) with the post-test attempt (PTA) (Z = 0.98, p = 0.32), and in the comparison of the mean of the last practice attempt (MLPA) with the post-test attempt (PTA) (Z = 0.62, p = 0.53), no statistically significant differences were found. The same occurred in the post-test comparison (PTA) between the groups (Z = 0.52; p = 0.60).
Transport Phase
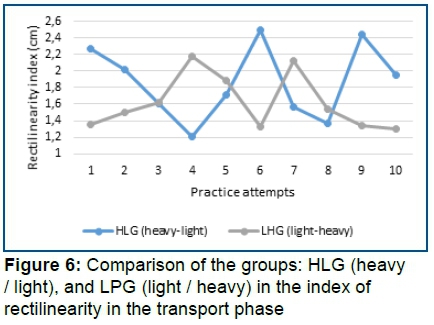
Regarding the rectilinearity index variable in the transport phase, no statistically significant differences were found in the comparison of the practice attempts (x2 = 7.85, gl = 8, p = 0.44). The same was observed when comparing the mean number of practice attempts (MPT) with the post-test (PTA) (Z = 1.29, p = 0.19) and comparing the mean of the last practice attempt (MLPA) with the post-test (PTA) (Z = 0.82, P = 0.40). The variance in the rectilinearity index in the transport phase in the groups was: HLG (σ2 = 0.19); LHG (σ2 = 0.73), (see figure 6). In the same way, no significant differences were found between the groups in the post-test (PTA) (Z = 1.36, p = 0.17) (Figure 6).
In relation to the mean velocity in the transport phase, the practice attempts were compared and no statistically significant differences were found in the intra-group comparison: LHG (x2 = 10.82, gl = 9, p = 0.28) and HLG = 5.91, gl = 9, p = 0.74). The same occurred in the comparison between the groups (x2 = 12.3; gl = 9; p = 0.19). The variance in the mean velocity in the transport phase in the groups was: HLG (σ2 = 168.18); LHG (σ2 = 73.39), (Figure 7).
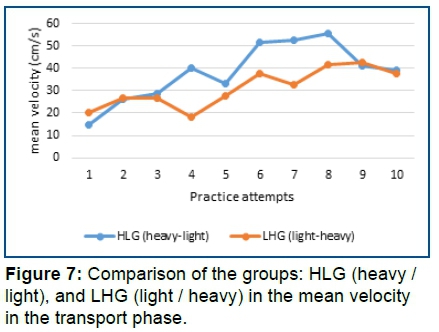
Comparing the mean velocity of the last practice trial (MLPA) with the post-test trial (PTA) (Z = 0.56, p = 0.56), and comparing the mean of the last practice trial (MLPA) with the post-test attempt (PTA) (Z = 0.31, p = 0.75), no statistically significant differences were found. The same occurred in the comparison of the post-test (PTA) between the groups (Z = 0.10; p = 0.91).
Regarding the peak velocity in the transport phase, intra-group practice attempts were compared: LHG (x2 = 14.6, gl = 8, p = 0.06) and HLG (x2 = 8.16, gl = 8, p = 0.41) and no statistically significant differences were found. On the other hand, a statistically significant difference was observed in the comparison between groups (x2 = 19.5; gl = 8; p = 0.01). The peak velocity variance in the reach phase in the groups was: HLG (σ2 = 390.70); LHG (σ2 = 99.62), (Figure 8).
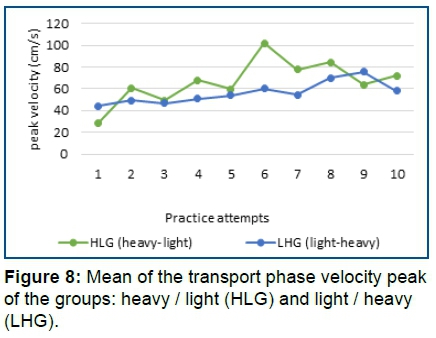
No statistically significant differences were found in the comparison of the last practice attempt (MLPA) with the post-test attempt (PTA) (Z = 0.05, p = 0.95), and in the comparison of the mean of the last practice attempt (MLPA) with the post-test attempt (PTA) (Z = 0.41, P = 0.67). The same occurred when the post-test (PTA) was compared between groups (Z = 0.31, p = 0.75).
DISCUSSION
This study aimed to investigate the effects of controlled practice on the tasks of reaching and transporting objects in 10-month-old infants when the weight of the object was changed. The proposal was to determine whether the infant would adapt to the weight of the object over the course of the practice, presenting more rectilinear trajectories with higher speeds and whether their lifting would be modified in the post-test phase when the weight of the object was changed.
In the comparisons of the variable index of rectilinearity, no statistically significant differences were found in the reach phase. In addition, no statistical differences were found in the mean velocity and peak velocity variables. However, when observing the results individually it can be perceived that infants who practiced with the heavy object increased their velocity over the course of the trials. Thus, it can be inferred that infants can adjust their actions more effectively. In this way, it must be considered that practice with heavy objects can favor the anticipation of performing the reaching task.
These results corroborate partially with the study of Mash12, who investigated the representation of objects in manipulative coordination, analyzing infants of 9, 12, and 15 months. In that study, two stimulus objects were presented in the practice period, of same size, material, and format, but different in color and weight. Afterwards, the experimenter presented two objects that had been hidden from the field of view, similar to those used in the practice, but with different colors and weights. With the changes in the weight of the objects it was possible to observe that the actions of the infant revealed a selective preparation specific to the objects handled during the practice period.
In the analysis of the transport phase, no statistically significant differences were found in the rectilinearity index variable. It should be emphasized that the infants demonstrated excessively variable behavior during the imposed period of practice, and this variation was presented more explicitly in the infants who performed the practice with the heavier object. In view of this, it can be inferred that the period of practice imposed was not sufficient for the infant to demonstrate a manipulative pattern.
No statistical differences were found in the comparison between the last practice attempt (MLPA) and the post-test attempt (PTA), in which the weight of the object was inverted, for any of the analyzed variables. One possible explanation for the absence of behavioral modification is that successful anticipation must be based on pre-existing knowledge about the objects of a given class23, as the infants did not have a manipulative pattern, and weight is a factor that can deceive the infant, because to perceive the change of weight it would be necessary to touch the object, the analyzed infant did not anticipate and did not adjust their manual actions efficiently.
In the results of comparisons between the groups, for the peak velocity variable observed in the transport phase, it can be seen that the infants performed adaptation of behavior throughout the trials, increasing the peak velocity values (P = 0.01). The mean velocity results also indicate that, during the trials, both groups increased mean velocity, although they did not present statistically significant differences. The changes in mean and peak velocity between the groups infer that the LHG was less variable than the HLG group. In this way, the results showed that the infants modified their actions based on the knowledge acquired during the practice, that is, the infants used the information obtained in the previous attempts to perform the next attempt.
According to Van der Kamp & Savelsbergh24, an individual's actions are adapted according to the available information, which is used to guide the movements. These actions are determined by the integration of individual constraints and changes in environmental information such as weight. The control of the actions of reaching and grasping are dependent on the proprioceptive system25, in this way, the weight of objects is perceived by the infant only when touching the object. Therefore, weight is a factor influencing the actions of infants.
With respect to the weight of the objects, it is known that experience is an important aspect, since the action can be anticipated from the view of the size of the object, but visual information is not precise, and can even elude the agent. This is emphasized by Mash12, highlighting the importance of experience involving physical contact and manipulation of objects. In the present study, the physical contact and transport of the object were essential, because the weight of the bars was not visually perceived. The results of the study by Corbetta & Snapp-Childs14 demonstrated that infants younger than nine months of age did not benefit greatly from improved perception and action after the imposed practice period. Although, at first glance, the observed results demonstrate numerous possibilities of responses in these younger infants, the researchers affirm that they bring valuable sensory-motor experience which is fundamental to support and drive change in development. Even young infants have shown small sporadic changes in perception and action over a short time scale, as in the study by Guimarães & Tudella26, which indicated that even short-term practice may increase an infant's intrinsic motivation to reach the object, demonstrating their sensory-motor capacity to perceive and respond to the demands of the task. In this way, it might have been necessary to practice for a longer time scale for these small changes to reflect on behavioral stability, becoming more consistent.
Studies such as those of Elman et al.27, Plumert & Spencer28, Thelen & Smith29 have shown that simple notions of cause and effect are insufficient to explain development, as changes occur within complex systems, with many components interacting across multiple time scales.
CONCLUSION
We conclude that the infants' actions of reaching and lifting throughout the attempts were very variable, but we evidenced that variability plays a crucial role in the process of acquiring motor skills. It can be inferred that 10-month-old infants go through a transitional period presenting a reorganizing state of these manipulative actions. However, further studies and investigations are needed to clarify the dynamic integration among various systems and time scales necessary for changes in the development process to occur.
Acknowledgments
The authors are grateful for the subsidies granted by CAPES and CNPq, in the form of a postdoctoral fellowship and Scientific Initiation, and for the contributions of Felipe Arruda Moura in the data routine, and Daniela Corbetta in the final revision of the text.
REFERENCES
1.Adolph KE, Robinson SR. Motor development. In: Lerner RM. Handbook of child psychology and developmental science. New York: Cognitive Processes, 2015; p. 114-57. [ Links ]
2.Newell KM, Jordan K. Task Constraints and Movement Organization: A Common Language. In: Davis WE. Ecological task analysis and movement. Human Kinetics, 2007; p. 5-23. [ Links ]
3.Hopkins B, Butterworth G. Dynamical systems approaches to the development of action. In: Bremner G, Slater A, Butterworth G. Infant development: recent advances. 1997; p. 75-100. [ Links ]
4.Thelen E, Smith LB. A dynamic systems approach to the development of cognition and action. Cambridge: MIT Press, 1993. [ Links ]
5.Rounis E, van Polanen V, Davare M. A direct effect of perception on action when grasping a cup. Scientific Rep. 2018;8:171. DOI: https://doi.org/10.1038/s41598-017-18591-5 [ Links ]
6.Wiesen SE, Watkins RM, Needham AW. Active motor training has long-term effects on infants' object exploration. Front Psychol. 2016;7:599. DOI: https://doi.org/10.3389/fpsyg.2016.00599 [ Links ]
7.Libertus K, Joh AS, Needham AW. Motor training at 3 months affects object exploration 12 months later. Develop Sci. 2016;19(6):1058-66. DOI: https://doi.org/10.1111/desc.12370 [ Links ]
8.Baumgartner HA, Oakes LM. Investigating the relation between infants' manual activity with objects and their perception of dynamic events. Infancy. 2013;18(6):983-1006. DOI: https://doi.org/10.1111/infa.12009 [ Links ]
9.Bourgeois KS, Khawar AW, Neal SA, Lockman JJ. Infant manual exploration of objects, surfaces, and their interrelations. Infancy. 2005;8(3):233-52. DOI: http://dx.doi.org/10.1207/s15327078in0803_3 [ Links ]
10. Newell KM. Change in motor learning: a coordination and control perspective. Motriz. 2003;9(1):1-6. [ Links ]
11.Rocha NACF, Costa CSN, Savelsbergh G, Tudella E. The effect of additional weight load on infant reaching. Infant Behav Dev. 2009;32(2):234-37. DOI: https://doi.org/10.1016/j.infbeh.2008.12.012 [ Links ]
12.Mash C. Object representation in infants' coordination of manipulative force. Infancy. 2007;12(3):329-41. DOI: https://doi.org/10.1080/15250000701518768 [ Links ]
13.Corbetta D, Thelen E, Johnson K. Motor constraints on the development of perception-action matching in infant reaching. Infant Behav Dev. 2000;23(3-4):351-74. DOI: https://doi.org/10.1016/S0163-6383(01)00049-2 [ Links ]
14.Corbetta D, Snapp-Childs W. Seeing and touching: the role of sensory-motor experience on the development of infant reaching. Infant Behav Dev. 2009;32(1):44-58. DOI: https://doi.org/10.1016/j.infbeh.2008.10.004 [ Links ]
15.Molina M, Jouen F. Weight perception in 12-month-old infants. Infant Behav Dev. 2003; 26(1):49-63. https://doi.org/10.1016/S0163-6383(02)00168-6 [ Links ]
16.Mounoud P, Bower TGR. Conservation of weight in infants. Cognition. 1974;3(1):29-40. DOI: https://doi.org/10.1016/0010-0277(74)90021-3 [ Links ]
17.Lockman JJ, Ashmead DH, Bushnell EW. The development of anticipatory hand orientation during infancy. J Exp Child Psychol. 1984;37(1):176-86. DOI: https://doi.org/10.1016/0022-0965(84)90065-1 [ Links ]
18.Wilcox T. Object individuation: Infants' use of shape, size, pattern, and color. Cognition. 1999;72(2):125-66. DOI: https://doi.org/10.1016/S0010-0277(99)00035-9 [ Links ]
19.Rocha NACF, Silva FPS, Tudella E. The impact of object size and rigidity on infant reaching. Infant Behav Dev. 2006;29(2):251-61. DOI: https://doi.org/10.1016/j.infbeh.2005.12.007 [ Links ]
20.Hesse C, Franz VH. Corrective processes in grasping after perturbations of object size. J Motor Behav. 2009;41(3):253-73. DOI: https://doi.org/10.3200/JMBR.41.3.253-273 [ Links ]
21.Corbetta D, Thelen E. A method for identifying the initiation of reaching movements in natural prehension. J Motor Behav. 1995;27(3):285-93. DOI: http://dx.doi.org/10.1080/00222895.1995.9941718 [ Links ]
22.Thelen E, Corbetta D, Spencer JP. Development of reaching during the first year: role of movement speed. J Exp Psychol Hum Percept Perform.1996;22(5):1059-76. DOI: http://dx.doi.org/10.1037/0096-1523.22.5.1059 [ Links ]
23.Gordon AM, Fossberg H. Development of neural mechanisms underlying grasping in children. In: Neurophysiology and neuropsychology of motor development. London: Mac Keith and Cambridge University, 1997; p. 214-31. [ Links ]
24.van der Kamp J, Savelsbergh G. Action and perception in infancy. Infant Behav Dev. 2000;23(3-4):237-51. DOI: https://doi.org/10.1016/S0163-6383(01)00071-6 [ Links ]
25.Van der Fits IB, Otten E, Klip AW, Van Eykern LA, Hadders-Algra M. The development of postural adjustments during reaching in 6- to 18-month-old infants. Evidence for two transitions. Exp Brain Res. 1999;126(4):517-28. DOI: https://doi.org/10.1203/00006450-199907000-00001 [ Links ]
26.Guimarães EL, Tudella E. Immediate effect of training at the onset of reaching in preterm infants: randomized clinical trial. J Mot Behav. 2015;47(6):535-49. DOI: https://doi.org/10.1080/00222895.2015.1022247 [ Links ]
27.Elman JL, Bates EA, Johnson MH, Karmiloff-Smith A, Parisi D, Plunkett K. Neural network modeling and connectionism. Rethinking innateness: a connectionist perspective on development. Cambridge: The MIT Press, 1996. [ Links ]
28.Plumert JM, Spencer JP. The emerging spatial mind. Oxford, UK: Oxford University Press, 2007. [ Links ]
29.Thelen E, Smith LB. A dynamical systems approach to the development of perception and action. Cambridge: MIT Press, 1994. [ Links ]
 Correspondence:
Correspondence:
laislacs4@gmail.com
Manuscript received: November 2018
Manuscript accepted: July 2019
Version of record online: October 2019


{kind=link}
{kind=link}